Puntos y vectores el plano (1ºBach)
De Wikipedia
| Revisión de 13:25 10 oct 2016 Coordinador (Discusión | contribuciones) (→Operaciones con vectores) ← Ir a diferencia anterior |
Revisión de 16:06 10 oct 2016 Coordinador (Discusión | contribuciones) (→Simétrico de un punto respecto de otro) Ir a siguiente diferencia → |
||
| Línea 182: | Línea 182: | ||
| ==Simétrico de un punto respecto de otro== | ==Simétrico de un punto respecto de otro== | ||
| + | Para calcular el punto simétrico de un punto respecto de otro, utilizaremos la anterior fórmula del punto medio, tomando como datos los puntos A y M y como incógnita el punto B. Luego despejaremos de las ecuaciones resultantes las coordenadas del punto B. | ||
| + | |||
| + | También podemos hacer uso de la siguiente fórmula: | ||
| + | |||
| {{Tabla75|celda2= | {{Tabla75|celda2= | ||
| <center>[[Imagen:puntosimetrico.gif|200px]]</center> | <center>[[Imagen:puntosimetrico.gif|200px]]</center> | ||
Revisión de 16:06 10 oct 2016
| Enlaces internos | Para repasar o ampliar | Enlaces externos |
| Indice Descartes Manual Casio | WIRIS Geogebra Calculadoras |
Tabla de contenidos |
Sistema de referencia en el plano
Un sistema de referencia del plano consiste en una terna En este sistema de referencia, cada punto Si el vector Normalmente trabajaremos con un sistema de referencia ortonormal, que es aquel en el que la base es ortonormal. |  Sistema de referencia ortonormal |



 del plano tiene asociado un vector fijo
del plano tiene asociado un vector fijo 
 respecto de la base
respecto de la base 
En esta escena podrás ver como se obtienen las coordenadas de un punto respecto de un sistema de referencia del plano a partir de su vector de posición.
Coordenadas del vector que une dos puntos
Coordenadas del vector que une dos puntos
 Demostración: Partimos de que Por tanto, |  |


Siendo P = (x0,y0) y Q = (x1,y1) puntos del plano, en este vídeo definimos el concepto de "vector fijo" asociado al par ordenado (P,Q). Visualizamos dicho vector fijo mediante una "flecha" que tiene origen en "P" y extremo en "Q". El vector fijo asociado al par (Q,P) se dice "opuesto" del asociado al par (P,Q). En términos matemáticos, el vector fijo asociado al par ordenado (P,Q) queda identificado mediante el par ordenado de números reales (x1 − x0,y1 − y0), que se obtiene al restar las coordenadas del punto "P" a las coordenadas del punto "Q". De dicho par (x1 − x0,y1 − y0) se dice que son las coordenadas del vector fijo.
Estudio del signo de las coordenadas de un vector  según la posición del origen A y el extremo B del vector.
según la posición del origen A y el extremo B del vector.
Siendo P = (x0,y0) y Q = (x1,y1) puntos del plano, las coordenadas del "vector fijo" asociado al par ordenado (P,Q) son  .
.
En este vídeo nos dan las coordenadas del vector fijo y las del punto "P" (punto "Q"), pidiéndonos que determinemos las coordenadas del punto "Q" (punto "P").
En esta escena podrás calcular las coordenadas del vector que une dos puntos del plano.
Vectores equipolentes
- Dos vectores fijos se dicen "equipolentes" si tienen el mismo módulo, dirección y sentido o, equivalentemente, si tienen las mismas coordenadas.
- Si el vector fijo asociado al par (M,N) es equipolente al vector fijo asociado al par (S,T), los segmentos MT y NS tienen el mismo punto medio, y si los puntos "M", "N", "S" y "T" nos están alineados, el polígono cuyos vértices son esos puntos es un paralelogramo.
- Se llama "vector libre" al CONJUNTO formado por un vector fijo y todos los equipolentes a él.
Conocidos 3 puntos del plano hallar un cuarto punto tal que forme con los otros tres un paralelogramo.
En esta escena podrás ver como vectores equipolentes tienen las mismas coordenadas.
Condición para que tres puntos estén alineados
Condición para que tres puntos estén alineados
- Los puntos del plano
 ,
,  y
y  , están alineados si se cumple:
, están alineados si se cumple:
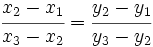
Los puntos del plano , y , están alineados si los vectores y  tienen la misma dirección.
tienen la misma dirección.
Ahora, esto ocurre si los vectores son proporcionales: 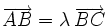

 , se obtiene lo que buscamos.
, se obtiene lo que buscamos.- Producto de un escalar por un vector
- Propiedades
- Vectores colineales
- Condición para que tres puntos estén alineados
Punto medio de un segmento
Punto medio de un segmento
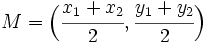 Demostración: Sea
Videotutorial Videotutorial |  |
 , de un segmento de extremos
, de un segmento de extremos 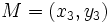 el punto medio del segmento
el punto medio del segmento 


Simétrico de un punto respecto de otro
Para calcular el punto simétrico de un punto respecto de otro, utilizaremos la anterior fórmula del punto medio, tomando como datos los puntos A y M y como incógnita el punto B. Luego despejaremos de las ecuaciones resultantes las coordenadas del punto B.
También podemos hacer uso de la siguiente fórmula:
Simétrico de un punto respecto de otro
 . .Demostración: El punto
|  |
 respecto del punto
respecto del punto  es:
es:


Traslaciones y homotecias
Traslación de vector  .
.
Videotutorial
- Suma de vectores: método del paralelogramo.
- Coordenadas del vector suma.
- Propiedades de la suma de vectores.
- Suma de vectores como composición de traslaciones.
Homotecia de razón k
Operaciones con vectores
Videotutorial
Videotutorial

